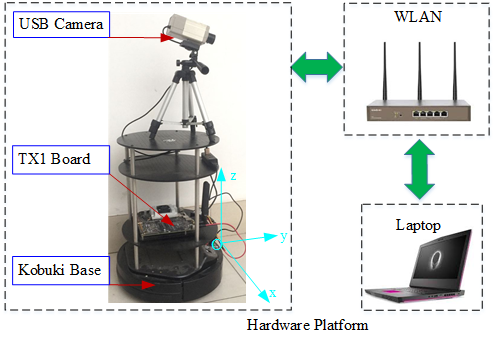
Person following robot platform.
In this paper, we present a person following robot based on monocular vision with long-range perception. The proposed autonomous system can achieve target tracking, scene semantic segmentation, target localizing and path planning, with a valid perception range of more than 15m. A monocular camera is employed to obtain visual information from the surroundings. The localization algorithm can obtain the accurate 2D coordinates of target on the floor based on camera calibration and coordinates projection. Path planning is employed to search for an optimal trajectory between the robot and target in long distance. Experimental results in indoor and hallway environments show that the autonomous mobile robot can follow a person effectively in real time with long-range perception.
Wei Zhang et al. Autonomous Person Following Robot with Long-Range Perception, submitted to IEEE Transactions on Systems, Man and Cybernetics: Systems.
School of Control Science and
Engineering
Shandong University
VSISlab.com © 2014-2024. All Rights Reserved.
