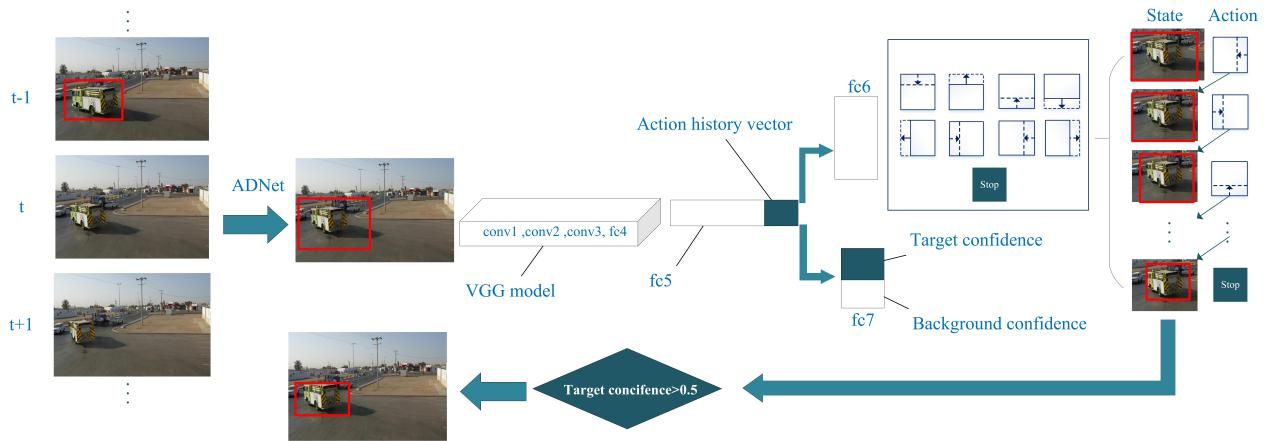
Proposed boundary-decision network for UAV tracking.
The aspect ratio change of a target appears frequently from the perspective of a UAV, which makes the aerial tracking very challenging. Traditional trackers struggle from such problem as they mainly focus on the scale variation issue by maintaining a certain aspect ratio. In this paper, we propose a novel tracker, named boundary-decision network (BDNet), to address the aspect ratio variation in UAV tracking. Unlike previous work, the proposed method aims at operating each boundary separately with a policy network. Given an initial estimate of the bounding box, a sequential actions are generated to tune the four boundaries with an optimization strategy including boundary proposal rejection, offline and online learning. Experimental results on the benchmark aerial dataset prove that the proposed approach outperforms existing trackers and produces significant accuracy gains in dealing with the aspect ratio variation in UAV tracking.
Wei Zhang et al. UAV Target Tracking with A Boundary-Decision Network, submitted to ICPR, 2018.
School of Control Science and
Engineering
Shandong University
VSISlab.com © 2014-2024. All Rights Reserved.
